Repte 7
Calibratge distància i gir
a) Mesurar la distància que recorre el robot en un temps donat ( a una velocitat ) per poder calibrar el robot.
b) Mesurar l'angle girat en un temps donat ( a una velocitat ) per poder calibrar el robot.
c) Fer que recorri 1m
d) Fer que giri 90º
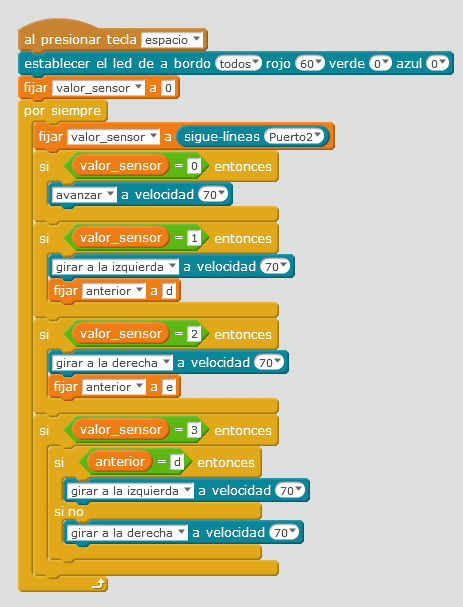
e) Fer que es mogui per un circuit recte
f) Fer que es mogui per un circuit corbat
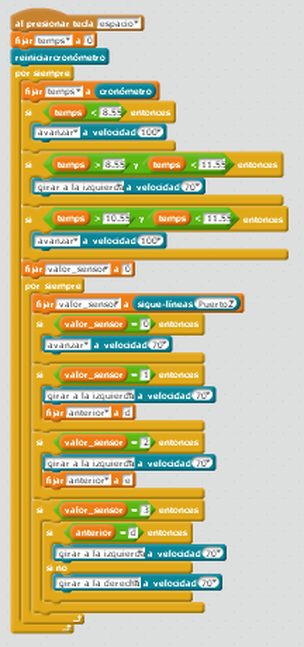
g) Fer que es mogui per un circuit recte, arriba fins a la capsa i torna al circuit corbat.
h)El robot avança-> troba caixa-> gira fins trobar l'altre línia i torna amb seguidor de línies
a) Mesurar la distància que recorre el robot en un temps donat ( a una velocitat ) per poder calibrar el robot.
b) Mesurar l'angle girat en un temps donat ( a una velocitat ) per poder calibrar el robot.
c) Fer que recorri 1m
d) Fer que giri 90º
e) Fer que es mogui per un circuit recte
f) Fer que es mogui per un circuit corbat
g) Fer que es mogui per un circuit recte, arriba fins a la capsa i torna al circuit corbat.
h)El robot avança-> troba caixa-> gira fins trobar l'altre línia i torna amb seguidor de línies
|
|
|
|
|
